Dans cette rubrique je vous décris les modules que j'ai personnellement utilisés avec les PICBASIC2000.
J'espère pouvoir vous en présenter d'autres rapidement.
![]() Platine PNP BOARD
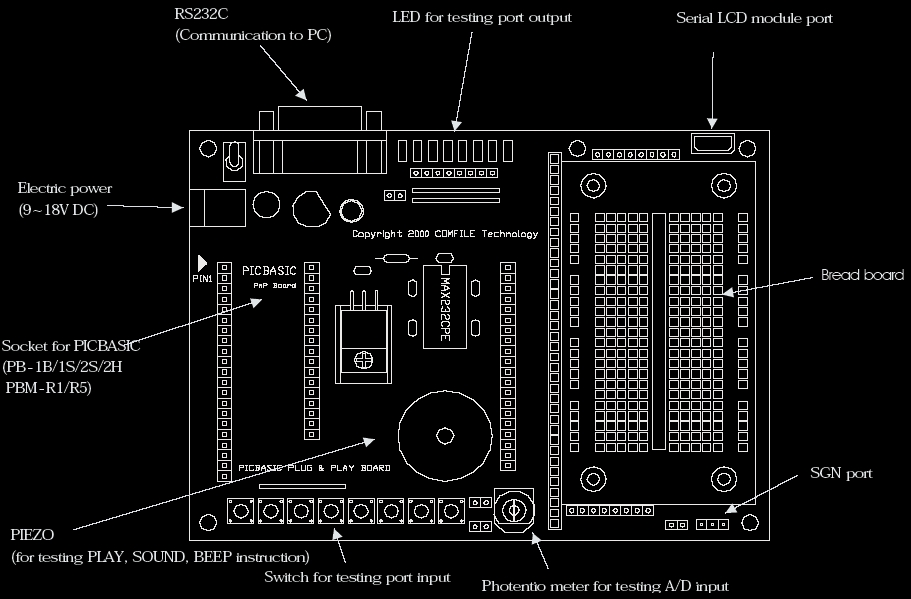
Platine PNP BOARD
Cette plate-forme de développement est indispensable pour expérimenter très rapidement et simplement les immenses possibilités des "PBM-R5" (elle peut également recevoir les PICBASIC™ série 1 / 2 et les PICBASIC2000 - à savoir les PB-1B / 1S / 2S / 2H / PBM-R1 / PBM-R5). Elle est livrée pré-câblée et dispose de toute la partie régulation +5V, d'une interface vous permettant "d'attaquer" directement le port "RS-232" d'un ordinateur si l'application que vous avez développée le nécessite.
8 boutons-poussoirs, 8 Leds, un buzzer, une plaque de connexion rapide 192 contacts, un connecteur spécifique pour le raccordement optionnel d'un afficheur à commande série, un potentiomètre équipent également la platine. Tous ces dispositifs disposent de bornes de connexions vous permettant grâce à des fils rigides de réaliser des centaines de combinaisons pour les besoins de vos tests et développements. De plus, toutes les bornes des "PICBASIC" sont facilement accessibles et repérées sur un connecteur spécifique. Dimensions de la platine: 135 x 100 mm.
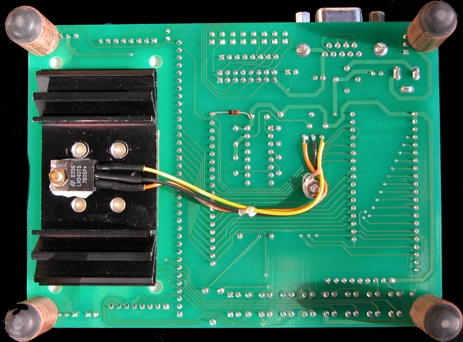
La face arrière de ma PnPBoard, sur laquelle j'ai déporté le régulateur 5V pour lui coller un gros radiateur...
D'origine le régulateur ce trouve juste en dessous du PICBASIC, lors de longs tests, cela ne me plaisais pas d'avoir le PICBASIC qui chauffe légèrement à cause du régulateur .
Ensuite, j'ai fixé quatre pieds en bakélite avec des embouts en caoutchouc.
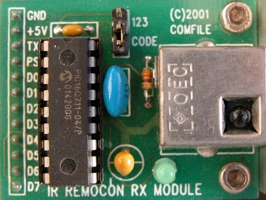
![]() Module
télécommande
Module
télécommande
|
La télécommande
Le récepteur |
IR Remocon kit
NOTE D'APPLICATION :
Position (123) |
Petit programme pour retrouver le code correspondant à chaque touche
![]()
Personnellement je trouve ce module vraiment génial...
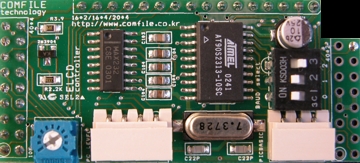
![]() Module
commande servomoteurs
Module
commande servomoteurs
|
|
SMC
|
Très pratique et vraiment simple d'utilisation...
![]() Modules
de commande série pour afficheur LCD
Modules
de commande série pour afficheur LCD
|
|
ELCD
|
|
|
ALCD |
Vous pouvez
télécharger la notice de ALCD (en anglais) ![]() et de ELCD toujours (en anglais)
et de ELCD toujours (en anglais)
![]()
Pour plus d'informations sur l'utilisation des modules ELCD et ALCD consultez la rubrique LCD
![]() Platine
de conversion RS 232
Platine
de conversion RS 232
|
|
RS-CONV Bien pratique pour faire vos essais de communication entre PICBASIC et PC ou comme dans ma rubrique PROJETS, l'interfaçage entre un PBM-R5 et un PALM Vx.
Peut être
aussi utilisé avec le module IR REMOCON pour piloter votre PC via la
télécommande IR. |
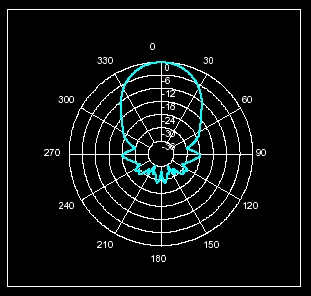
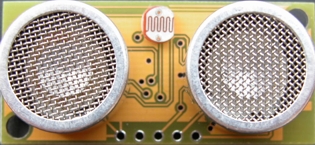
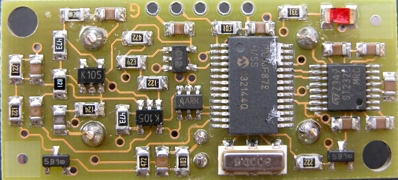
![]() Module
télémètre ultrason "MSU04"
Module
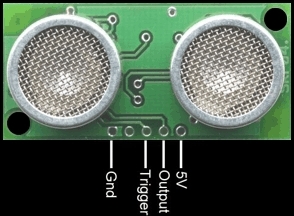
télémètre ultrason "MSU04"
Comme certains capteurs infrarouges, les modules ultrasons permettent une mesure de distance. Le principe est la transmission d’un « paquet » d’ondes de pression ultrasoniques et de mesurer le temps après lequel l’écho revient sur le récepteur. La distance de l’objet qui a produit l’écho peut être mesurée, connaissant la vitesse de propagation du son dans le milieu et la durée de vol
Distance = (Vitesse de propagation . durée de vol)/2
Dans l’air, à pression standard et à 20°C, la vitesse du son est d’environ c=343m/s. Les ondes ultrasoniques, qui ont des fréquences typiques entre 40 et 180 kHz sont en générale produites par un transducer de type piezo.


Ce nouveau
petit module, idéalement conçu pour les applications liées à la robotique est
capable de déterminer la distance qui le sépare d'un obstacle se présentant
devant lui (entre 3 cm et 3 m). Doté de 2 cellules ultrason, son principe de
fonctionnement repose sur celui des "sonars".
Il est doté d'une sortie délivrant des impulsions dont la largeur comprise entre
100 µs et 18 ms est directement proportionnelle avec la distance de l'obstacle
qui est présent devant lui .
Très facile a interfacé avec les modules PICBASIC2000 grâce à l'instruction
CAPTURE afin de réaliser des robots intelligents capables de "voir" et "évaluer"
leur environnement. Il pourra également être utilisé pour réaliser des systèmes
de télémétrie.
Des exemples de programmes pour PICBASIC sont disponible sur http://www.lextronic.fr/Comfile/PP1.htm à la rubrique "Notes d'applications".

Caractéristiques techniques:
- Alimentation: + 5 Vcc.
- Consommation: 30 à 50 mA env.
- Dimensions: 43 x 20 x 17 mm

Programme de détection avec affichage dynamique et bargraph.
Le programme US7.BAS
![]()
![]() Module
télémètre ultrason "SRF08"
Module
télémètre ultrason "SRF08"
Ce petit module, idéalement conçu pour les applications liées à la télémétrie et à la robotique en général, est capable de déterminer la distance qui le sépare d'un obstacle se présentant devant lui (entre 3 cm et 6 m). Doté de 2 cellules ultrason, son principe de fonctionnement repose sur celui des "sonars".
Il s'interface à l'aide de son bus I2C™ et se pilote à la manière d'une mémoire EEPROM type 24xx (Il pourra par exemple être très facilement interfacé avec les modules hybrides "PICBASIC™"). Ce dernier peut vous retourner la valeur de la distance en "mm", en "inch" ou sous forme d'une durée (en µs) liée à l'écho de l'émetteur ultrason. A noter enfin qu'il vous sera possible d'adresser jusqu'à 16 modules différents par le bus I2C.
Registres
- Adresse I2C : 0x70
- Listes des registres :
Adresse registre
Lecture
Ecriture
0
Version Soft
Command Register
1
Capteur de lumiére
Max Gain Register (default 31)
2
1st Echo High Byte
Range Register (default 255)
3
1st Echo Low Byte
N/A
~~~~
~~~~
~~~~
34
17th Echo High Byte
N/A
35
17th Echo Low Byte
N/A
- Détail des registres importants :
Command Register :
Permet de démarrer une mesure suivant 3 modes différents :
0x50 : Résultat en Inches
0x51 : Résultat en centimètres
0x52 : Résultat en microsecondes
Après l’envoi de cette commande, il faut attendre 65ms (dans le cas d’une mesure à 6 mètres) avant d’aller lire les distances des objets qui ont produit un écho. L’autre possibilité si on ne veut pas attendre, mais avoir le résultat dès que possible, c’est de lire le registre de version du soft qui vaudra 255 (0xFF) tant que la mesure n’est pas terminée.
Range Register :
Permet de spécifier la distance maxi que l’on souhaite mesurer (ce pour dire au module d’attendre un certain temps maximum correspondant aux échos de cette distance maxi)
( Range Register x 43 mm ) + 43 mm
Exemple : Range Register = 70 (0x46)
→ Distance maximum mesurable = ( 70 x 43 mm ) + 43 mm = 3053 mm
Echo :
Les objets sont détectés par un phénomène d’écho. Avec ce capteur vous pouvez mesurer jusqu’à 17 échos différents ( le premier écho correspond à l’objet le plus près ). Si une valeur d’écho vaut 0x00 alors tous les suivants valent également 0x00. Les distances des échos sont codées sur 16 bits, c’est pourquoi il y a deux registres de 8 bits, le LSB correspondant aux bits de poids faible et le MSB aux bits de poids fort.
Caractéristiques techniques:
- Alimentation: + 5 Vcc.
- Consommation: 15 mA env. - 3 mA (au repos).
- Dimensions: 43 x 20 x 17 mm
Le schéma du SRF08
![]() Module
Boussole "CMP03"
Module
Boussole "CMP03"
Il existe bien
d'autres modules chez
![]()
![]()